
Cómo Crear un Brazo Robótico con Arduino, Impresión 3D, Servomotores y Potenciómetros
La robótica se ha convertido en una disciplina fascinante para estudiantes, aficionados y profesionales. Un proyecto que destaca por su combinación de creatividad, tecnología y mecánica es la creación de un brazo robótico. Desarrollar un brazo robótico utilizando Arduino, piezas impresas en 3D, servomotores y potenciómetros no es muy complejo, en esta publicación podrás ver una demostración práctica del desplazamiento de cargas con una pinza robótica funcional.
¿Qué es un brazo robótico y por qué construir uno?
Un brazo robótico es un dispositivo mecánico que simula los movimientos del brazo humano, replicando su capacidad para realizar tareas como agarrar, levantar y mover objetos. Estos dispositivos son esenciales en la industria, pero también representan un excelente proyecto educativo para aprender sobre programación, electrónica y mecánica.
Crear un brazo robótico no solo te permite adquirir habilidades técnicas, sino que también abre las puertas a proyectos más avanzados en robótica y automatización.
Materiales y Componentes Necesarios
- Arduino Uno o similar: El cerebro del brazo robótico.
- Piezas impresas en 3D: Para construir la estructura del brazo y la pinza.
- Servomotores: Para mover las diferentes articulaciones del brazo.
- Potenciómetros: Para controlar el movimiento de cada articulación de forma precisa.
- Fuente de alimentación: Para alimentar los servomotores y la placa Arduino.
- Cables y protoboard: Para realizar las conexiones eléctricas necesarias.
Además, necesitarás software para diseñar las piezas 3D (como Tinkercad o Fusion 360) y programar la placa Arduino (usando el IDE de Arduino).
Pasos para Crear el Brazo Robótico
1. Diseño de la estructura
El diseño comienza en el software de modelado 3D. Cada componente del brazo (base, articulaciones y pinza) se diseña teniendo en cuenta las dimensiones de los servomotores y otros elementos mecánicos.
2. Impresión de las piezas
Utiliza una impresora 3D para fabricar las piezas del brazo. Asegúrate de usar un material resistente como PLA o ABS para garantizar la durabilidad.
3. Montaje del brazo robótico
Ensambla las piezas impresas y monta los servomotores en sus respectivos lugares. Conecta la pinza al extremo del brazo y asegúrate de que las articulaciones se muevan suavemente.
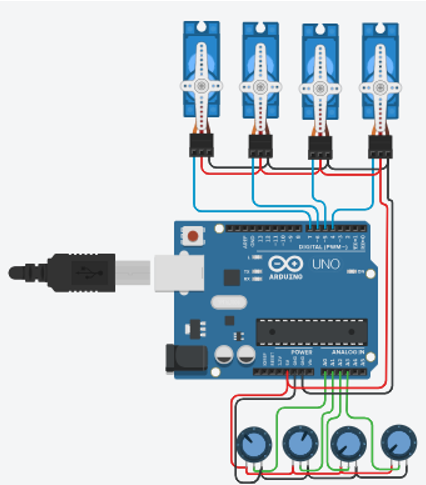
4. Configuración electrónica
Conecta los servomotores a la placa Arduino y usa potenciómetros para controlar sus movimientos. Cada potenciómetro se asociará a una articulación del brazo.
5. Programación en Arduino
Escribe un código en el IDE de Arduino para controlar los servomotores según la entrada de los potenciómetros. Aquí tienes un ejemplo básico:
#include <Servo.h>
Servo servoBase, servoBrazo, servoPinza;
int potBase = A0, potBrazo = A1, potPinza = A2;
void setup() {
servoBase.attach(9);
servoBrazo.attach(10);
servoPinza.attach(11);
}
void loop() {
int angBase = analogRead(potBase) / 6;
int angBrazo = analogRead(potBrazo) / 6;
int angPinza = analogRead(potPinza) / 6;
servoBase.write(angBase);
servoBrazo.write(angBrazo);
servoPinza.write(angPinza);
delay(15);
}
6. Pruebas y ajustes
Una vez ensamblado y programado, realiza pruebas para asegurarte de que todas las articulaciones se muevan correctamente. Ajusta el código si es necesario para optimizar los movimientos.
Demostración de Movimiento
En el proyecto final, el brazo robótico será capaz de agarrar objetos con su pinza y desplazarlos a diferentes ubicaciones. Por ejemplo, puedes configurarlo para mover pequeñas cargas, simular tareas industriales o realizar demostraciones educativas.
Brazo Robótico – Arduino
Link Simulación en Tinkercad: https://www.tinkercad.com/things/4CVBHOFsNaR-brazo-robotico-arduino?sharecode=rwfGtt7znyI3d3oKiKUvkwqLKYNFsLUAcjt7XeZTWZE


Código Arduino Brazo Robótico
Aplicaciones Futuras
- Control remoto: Usando Bluetooth o Wi-Fi.
- Automatización avanzada: Integrando sensores de distancia o cámaras.
- Aplicaciones prácticas: Desde tareas domésticas hasta experimentos en laboratorios.